Име на продукта |
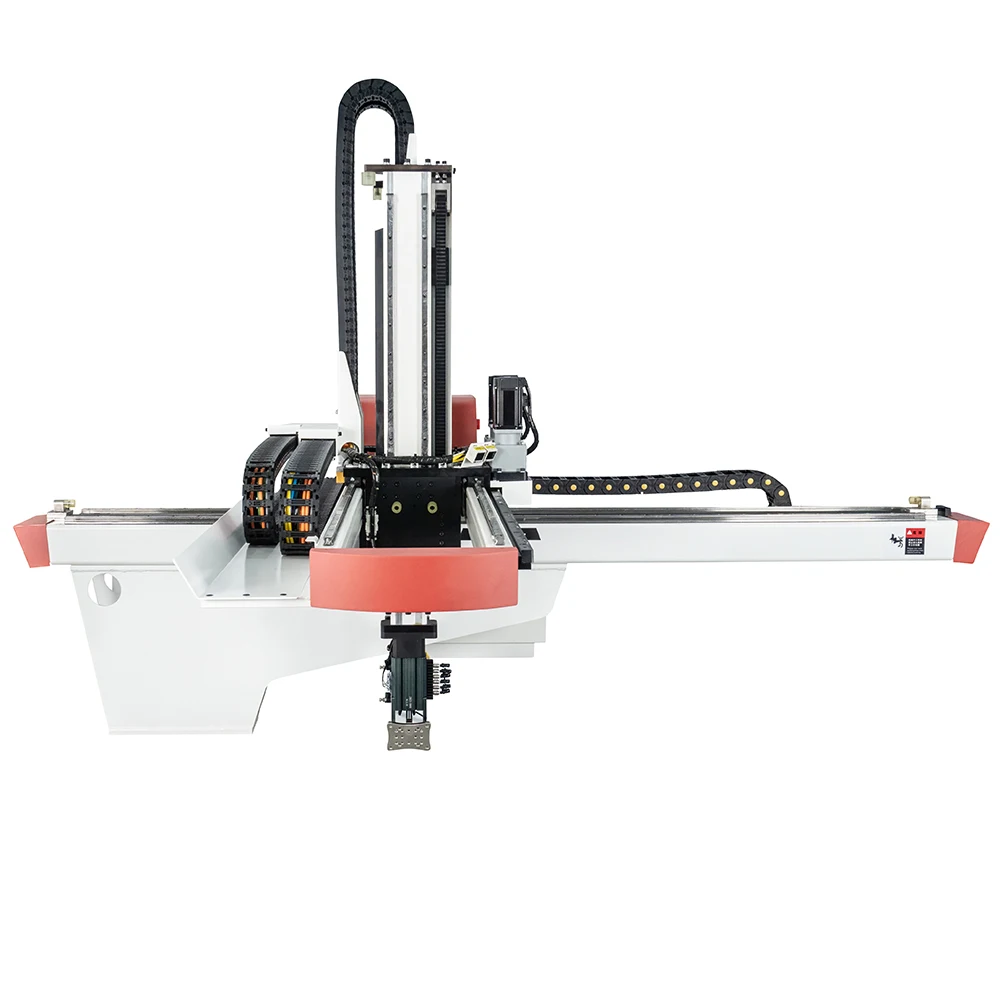
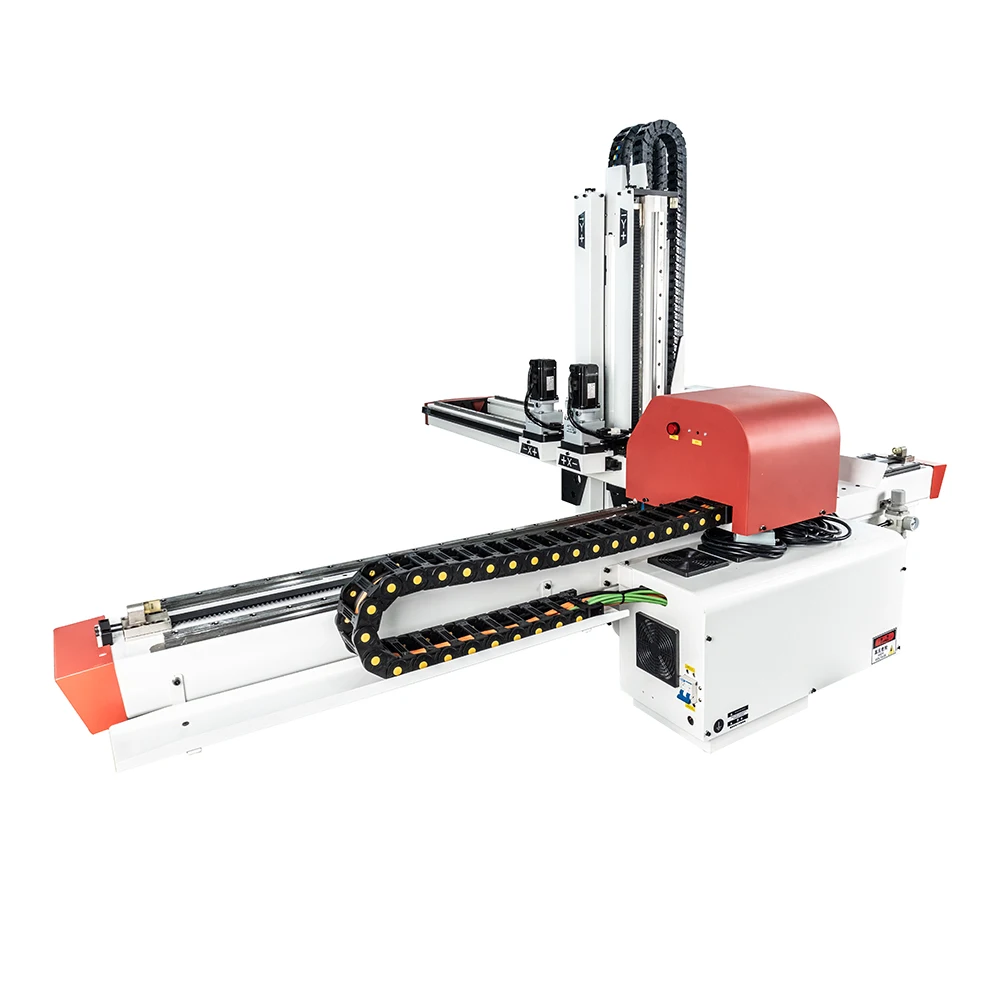
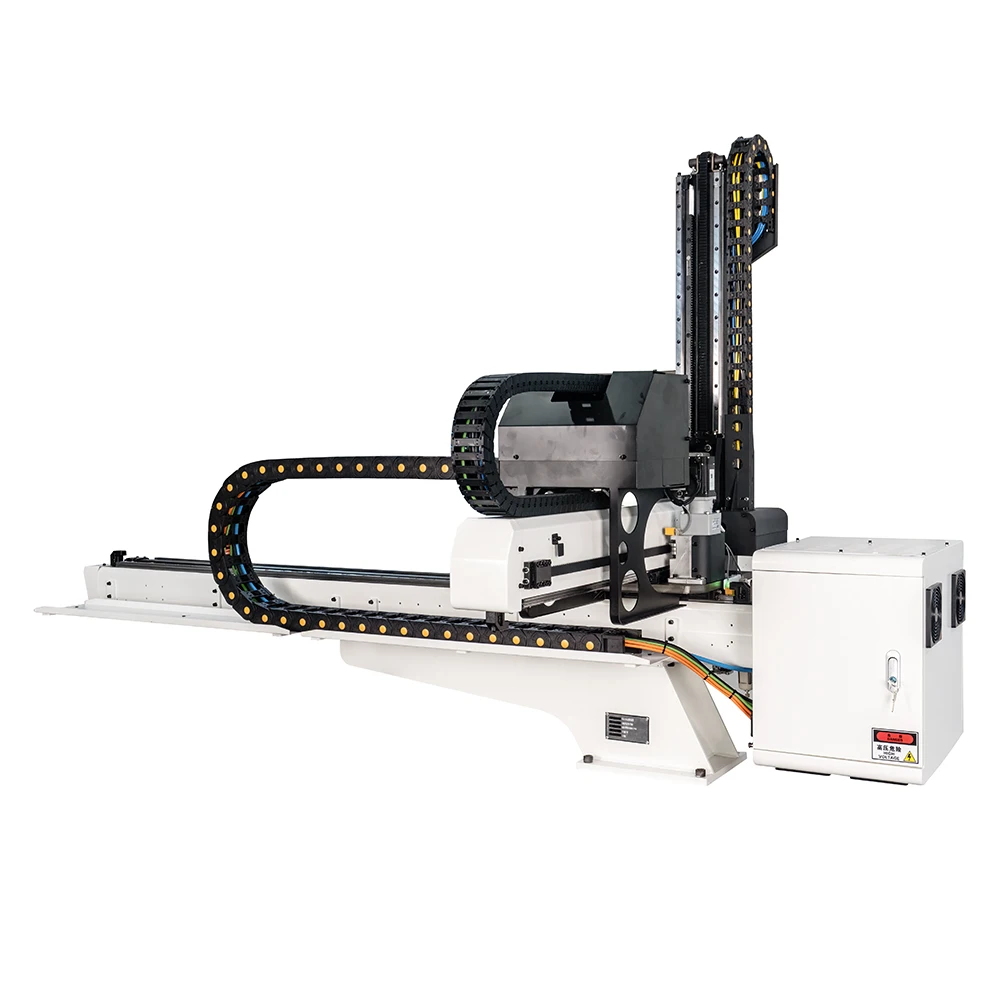
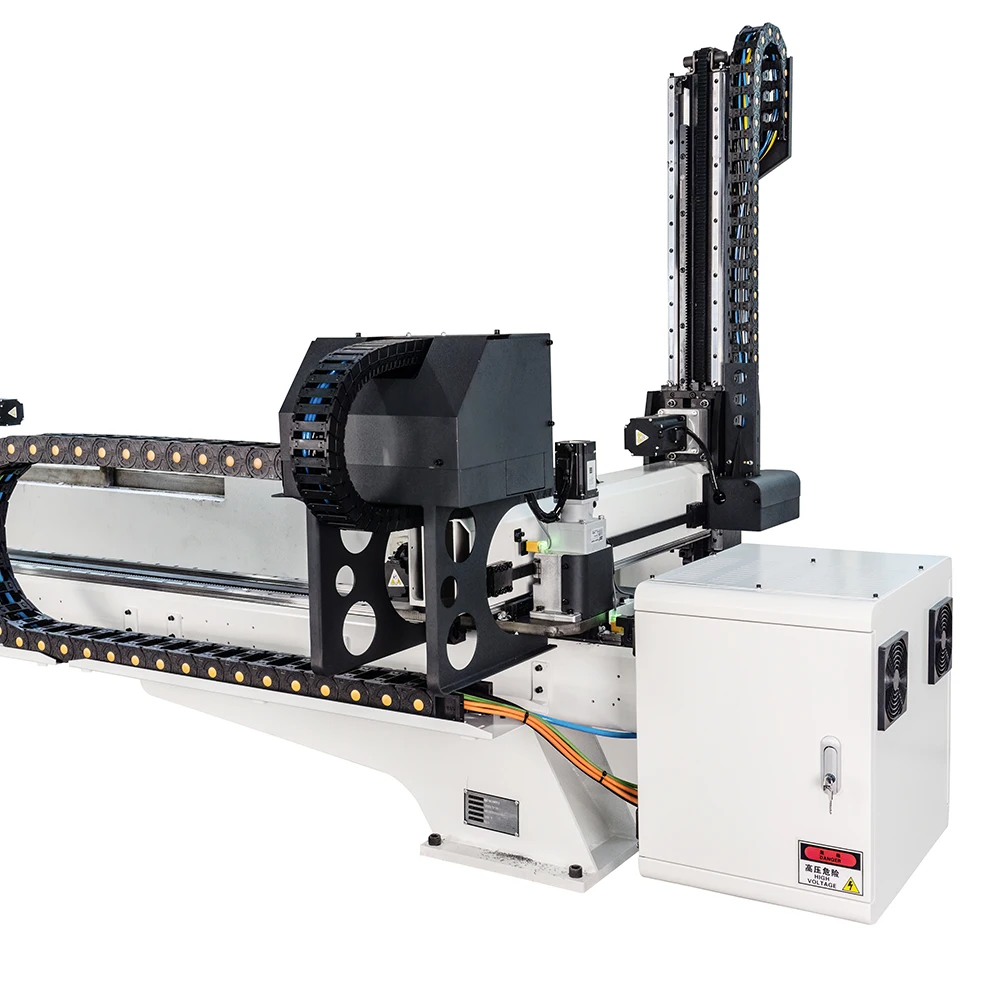
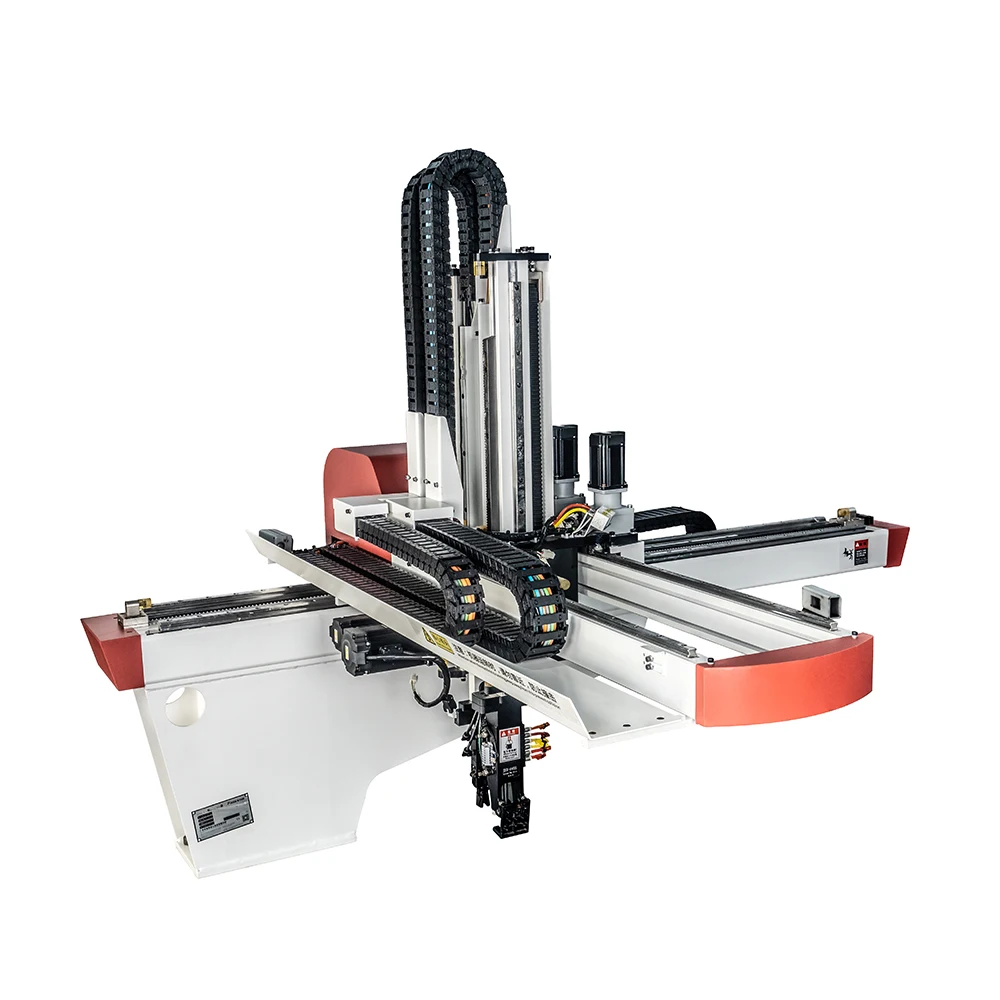
HXCW-5S Il -серия Рамновиден тип пълен серво манипулатор |
Макс. натоварване |
8кг |
Време за изваждане |
1.21Сек |
Двигателна система |
X1,X2,Y1,Y2,ZAC Сervo Мотор |
Структура на ръка |
Телескопичен тип |
Мощност |
AC220V 20A |
Консумация на енергия |
0.7Кв/ч |
Ъгъл на грипер |
90 |
Налягане на въздуха |
0.5-0.8 MPa |
Потребление на въздух |
1.0 НЛ/цикл |





























1. Как мога да получа цената?
-Обикновено правим оферти в рамките на 24 часа след получаване на вашето запитване (освен събота и празници).
-Ако сте много спешно нуждаен от цената, моля изпратете ни имейл или свържете се с нас по друг начин, за да ви предложим оферта.
2. Мога ли да купя примерки, правейки поръчка?
- Да. Моля, без колебание свържете се с нас.
3. Какво е вашето време за изпълнение?
-Зависи от количеството на поръчката, която правите.
-Обикновено можем да изпратим в рамките на 5 дни за малко количество и около 7-15 дни за голямо количество.
4. Какви са условията ви за плащане?
-Т/Т, Western Union, MoneyGram и PayPal. Това е преговорно.
5. Какъв е метода за доставка?
-Може да бъде изпратено морския път, по въздуха или чрез експресна доставка (EMS, UPS, DHL, TNT, FEDEX и др.). Моля, потвърдете с нас преди поръчване.
6. Как правите нашия бизнес дългосрочен и добрия ни отношения?
-1. Запазваме добро качество и конкурентна цена, за да гарантираме, че нашите клиенти получават полза;
- Две. Уважаваме всеки клиент като наш приятел и искрено правим бизнес и се сприятеляваме с него, независимо от това откъде идва.
HEEEXii
Предприятие, което предоставя решения за индустриална автоматизация, представя продукт с качеството на Манипулатор за Обработка на Материал с Подлагане на Роботна Ръка, предназначен да оптимизира управлението на материали за компании, които зависят от тях.
Този робот е произведена с прецизност като приоритет, построен да осигури надеждност за производствени и логистически задачи. Неговият тежки подлагания е предназначен да издържа най-тежките индустриални приложения. Роботната Ръка за Обработка на Материали на HEEEXii е идеална за заети складове и оптимизирана за висока продуктивност.
Чрез това решение HEEEXii можете да очаквате да разполагате с възможността да поставяте карери с лесност. Неговите напреднали захващащи енд-эффектори осигуряват необходимото засичане за тежки натоварвания, гарантирайки, че няма несъответствия по време на доставката на натоварването. Точното настройване на сигурносните механизми на роботската ръка дава увереност, че тя ще бъде в състояние да управлява всяка задача, поставена пред нея.
Наборът за управление на робот-манипулатор за обработка на материали включва напреднат контрол, който позволява на оператора да го управлява с точност. Манипулирането на този роботски набор е интуитивно, позволявайки на всеки оператор да го използва бързо и ефективно. Неговите джъджета за промяна и бутони позволяват на оператора да остане ангажиран, докато лесно управлява роботския набор.
Манипуляторът за обработка на материали HEEEXii е идеален за организации, които се опират на управлението на материали, за да оптимизират операциите си и максимизират ефективността. Този роботски ръкав може да бъде отговорът на всички ви нужди за обработка на материали, дали става дума за преместване на големи, тежки партиди от една страна на склада до друга или за извличане и позициониране на малки неща.
Това решение HEEEXii също се предлагa с експертна поддръжка, включително продължаваща техническа поддръжка за поддържане. HEEEXii гарантира напълното удовлетворение на клиентите си, като осигурява стандартното доставяне на роботи и продължава да произвежда помощ за клиента през целия жизнен цикъл на продукта.
Отивайки по-далеч, екипът от проектиращи инженери和技术ни специалисти на HEEEXii предлага опции за модифициране, които клиентите могат да адаптират според своите конкретни нужди. Те могат да проектират и да изготвят персонализирани краеви ефектори, които помагат да се повиши производителността, същевременно намалявайки рисковете и осигурявайки безопасността на работното място.









Guangdong Heeexii Robot Technology Co., Ltd. (abbreviation: Hengxing, HEEEXII), established in 2019, is a new star enterprise focusing on R&D, manufacturing, and sales of industrial injection molding robots.
Copyright © Guangdong Heeexii Robot Technology Co., Ltd. All Rights Reserved
 BG
BG
 EN
EN AR
AR
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 LV
LV
 SR
SR
 UK
UK
 VI
VI
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 MS
MS
 GA
GA
 BE
BE
 IS
IS
 LA
LA
 MN
MN
 KK
KK