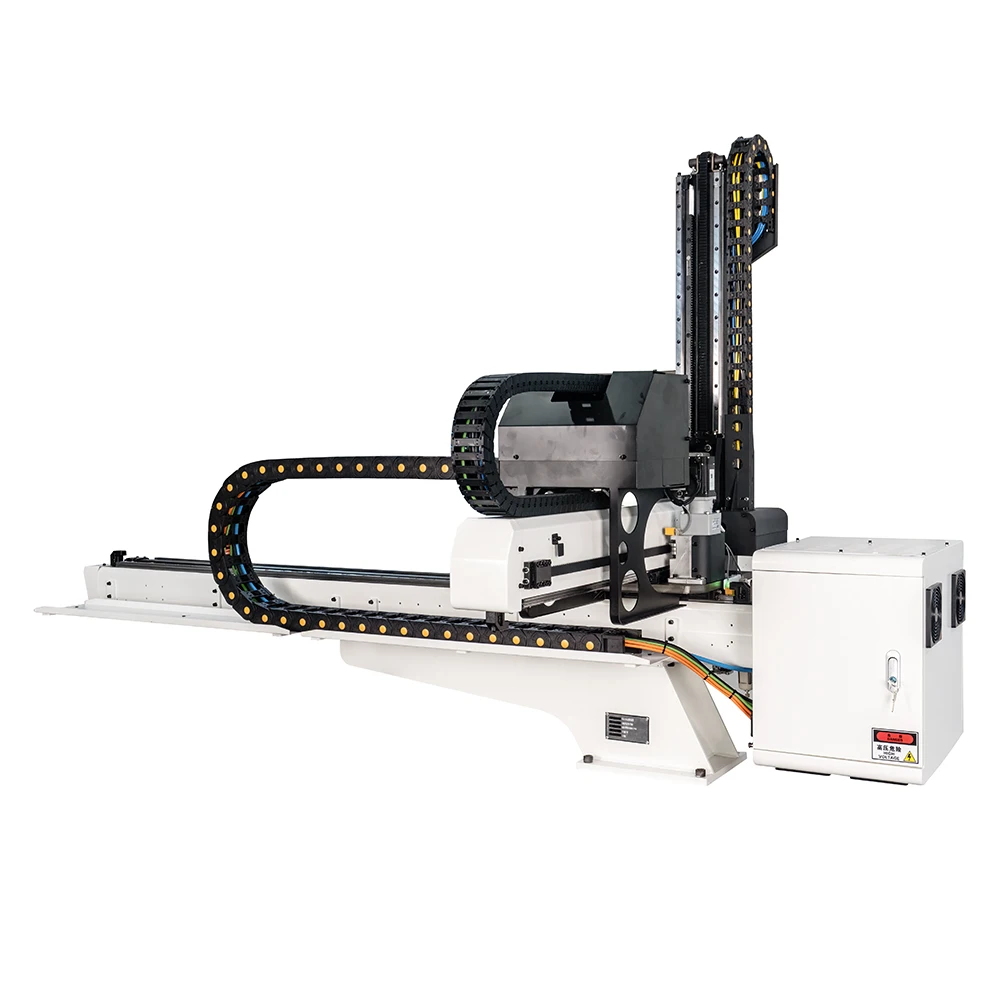
Termék neve |
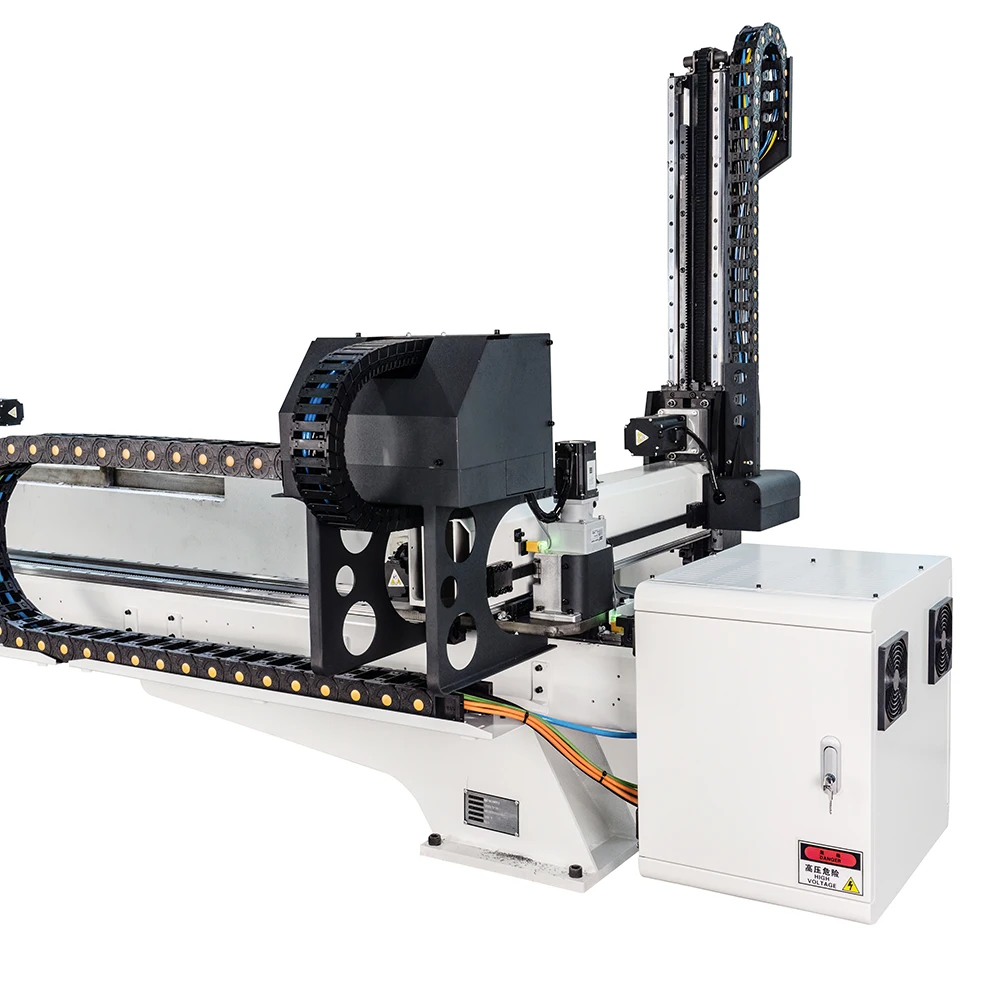
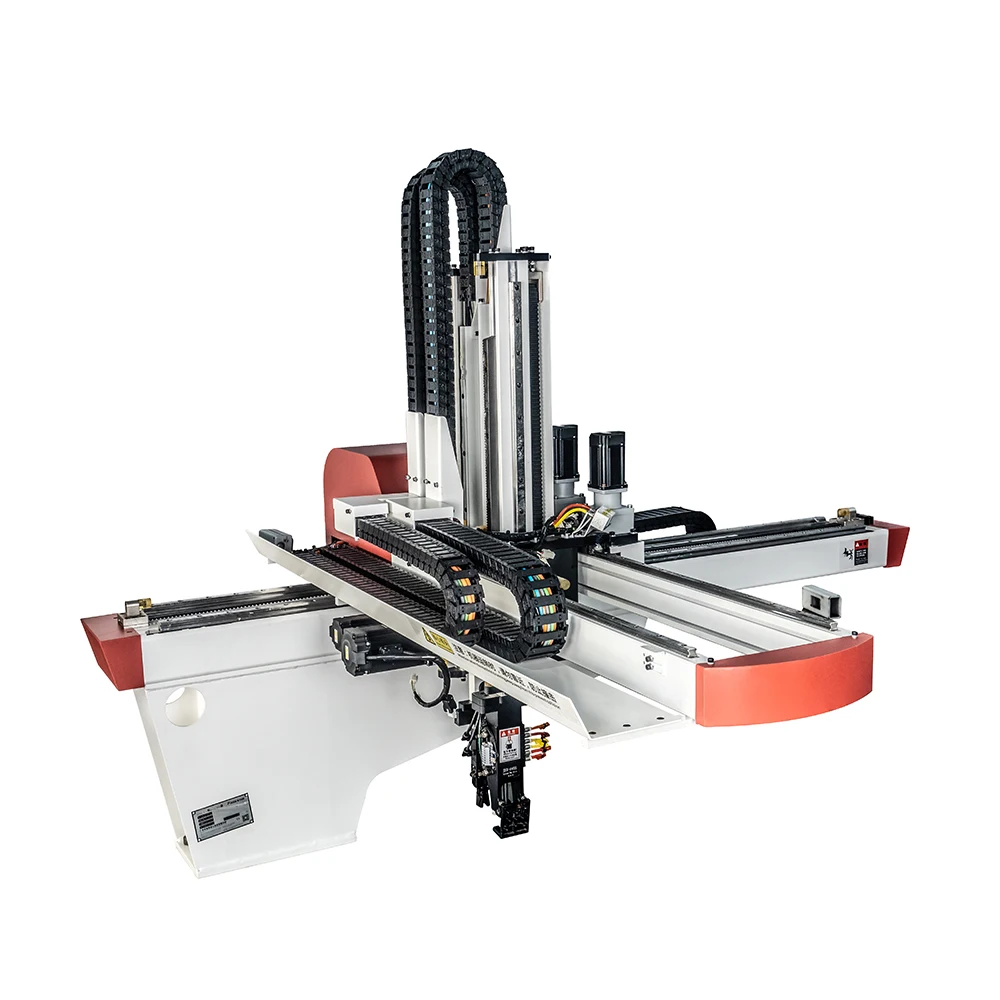
HXCW-5S Il -sorozat Típusos teljes szervó manipulátor |
Max. Töltés |
30kg |
Kiveszési idő |
2.22Sec |
Meghajtó rendszer |
X1,X2,Y1,Y2,ZAC Szervomotor |
Környezeti szerkezet |
Behúzható típus |
Teljesítmény |
AC220V 20A |
Teljesítményfogyasztás |
0.7Kw/h |
Gripper szög |
90 |
Légnyomás |
0,5-0,8 MPa |
Légfogyasztás |
1.0 NL/ciklus |





























Márka: HEEEXii
A HEEEXii közepes terhelésű háromtengelyes szervó teljesen elektrikus manipulátor ROS egy csúcsminőségű automatizáció, amely arra lett kifejlesztve, hogy optimalizálja gyártási folyamatot. Ez a termék valóban forradalmi, mivel a szervótechnológiát használja, ami pontos és stabil mozgást biztosít, amely növeli a gyártási műveletek teljes effektivitását. A manipulátor ROS olyan többféle ipari robotokkal van összeállítva, amelyek lehetővé teszik a maximális rugalmasságot, és ezzel egyaránt ideális bármilyen gyárautomatizálási alkalmazásra.
A HEEEXii Közepes Tömegű Három tengelyes Servó Elektromos Manipulátor Ros úgy lett kifejlesztve, hogy legfeljebb 50 kg-os tömegeket kezeljen, ami teszi lehetővé, hogy számos alkalmazás esetén ideális megoldást nyújtson. Emellett a háromtengelyes tervezet biztosítja a biztonságot és a pontosságot, amely maximumra növeli a hatékonyságot, így különösen alkalmas gyors sebességű gyártási sorokban. Az elektromos manipulátor kompakt tervezete lehetővé teszi, hogy csempés térképezéseket teljesítsen, és hatékonyan működjön egy sereg gyártási vonalakkal.
A HEEEXii Közepes Tömegű Háromtengelyes Servó Elektromos Manipulátor Ros megbízható gyártást nyújt, amely erős építés végénél kapott teljes eredmény. Ez a rendszer az Ázsiai kontinensen található, ahol minőségi ellenőrzést menet át ahhoz, hogy világszintű szabványokat teljesítson. A HEEEXii manipulátor ROS csodálatos anyagokból készül, amelyek akár a legnagyobb terhelésű gyártási folyamatokon is túl bírósítják. Ennélfogva, tervezés, a HEEEXii manipulátor ROS könnyebbé, költségekkel együtt, és biztonságosabbá teheti a gyártási folyamatot.
A HEEEXii manipulátor ROS számítékos eszköz közül a legtöbb közül is az, hogy erszényes bármely költségkeret és jelentősen csökkenti a munkaköltségeket. A manipulátor ROS olyan bonyolult feladatokra van tervezve, amelyek korábban egy emberi csapat teljesítményéhez igényeltak. Ez az automatizálási megoldás növeli a termelést a ciklusidők csökkentésével, ami szintén csökkenti a munkavállalók terhelését. A csapat mostantól több figyelmet fordíthat a bonyolultabb feladatokra, míg a manipulátor ROS fogja kezelni az ismétlődő, nem érdekeltető és nehéz feladatokat.









Guangdong Heeexii Robot Technology Co., Ltd. (abbreviation: Hengxing, HEEEXII), established in 2019, is a new star enterprise focusing on R&D, manufacturing, and sales of industrial injection molding robots.
Szerzői jog © Guangdong Heeexii Robot Technology Co., Ltd. Minden jog fenntartva.
 EN
EN
 AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 LV
LV
 SR
SR
 UK
UK
 VI
VI
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 MS
MS
 GA
GA
 BE
BE
 IS
IS
 LA
LA
 MN
MN
 KK
KK





