브랜드: HEEEXii
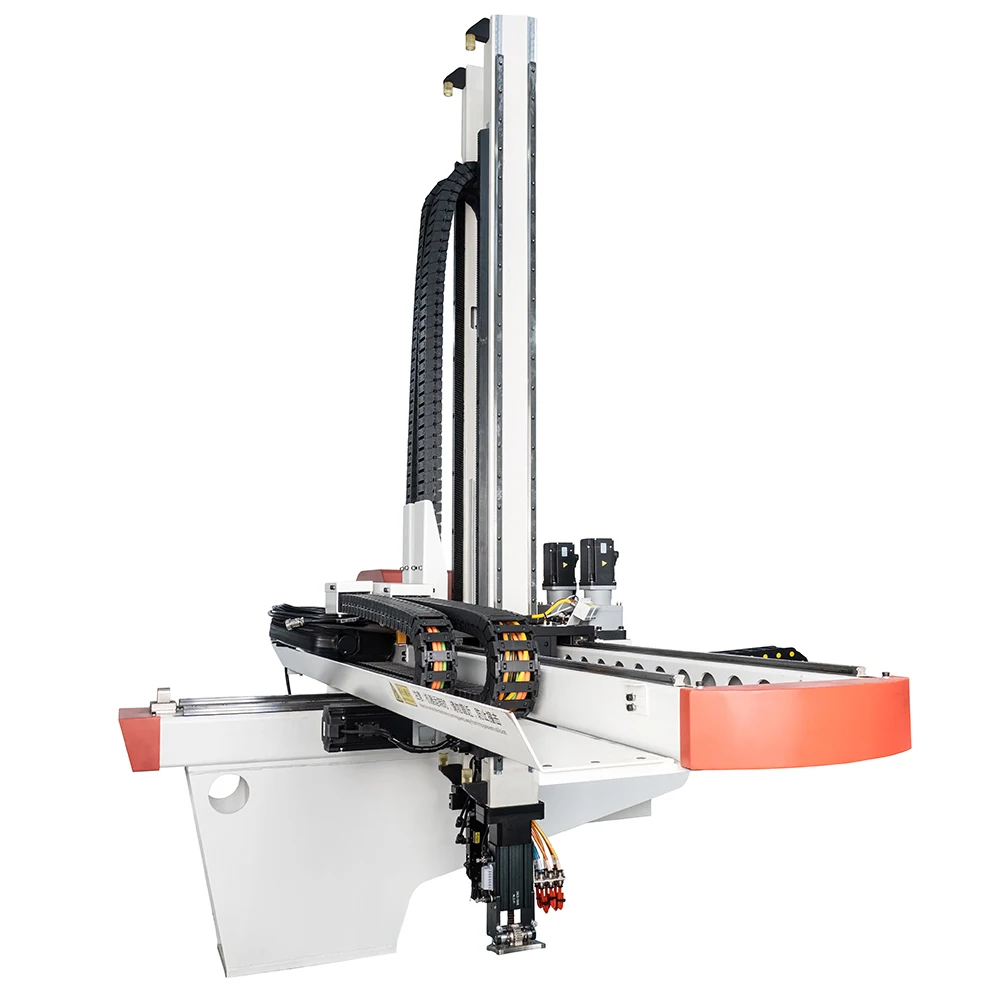
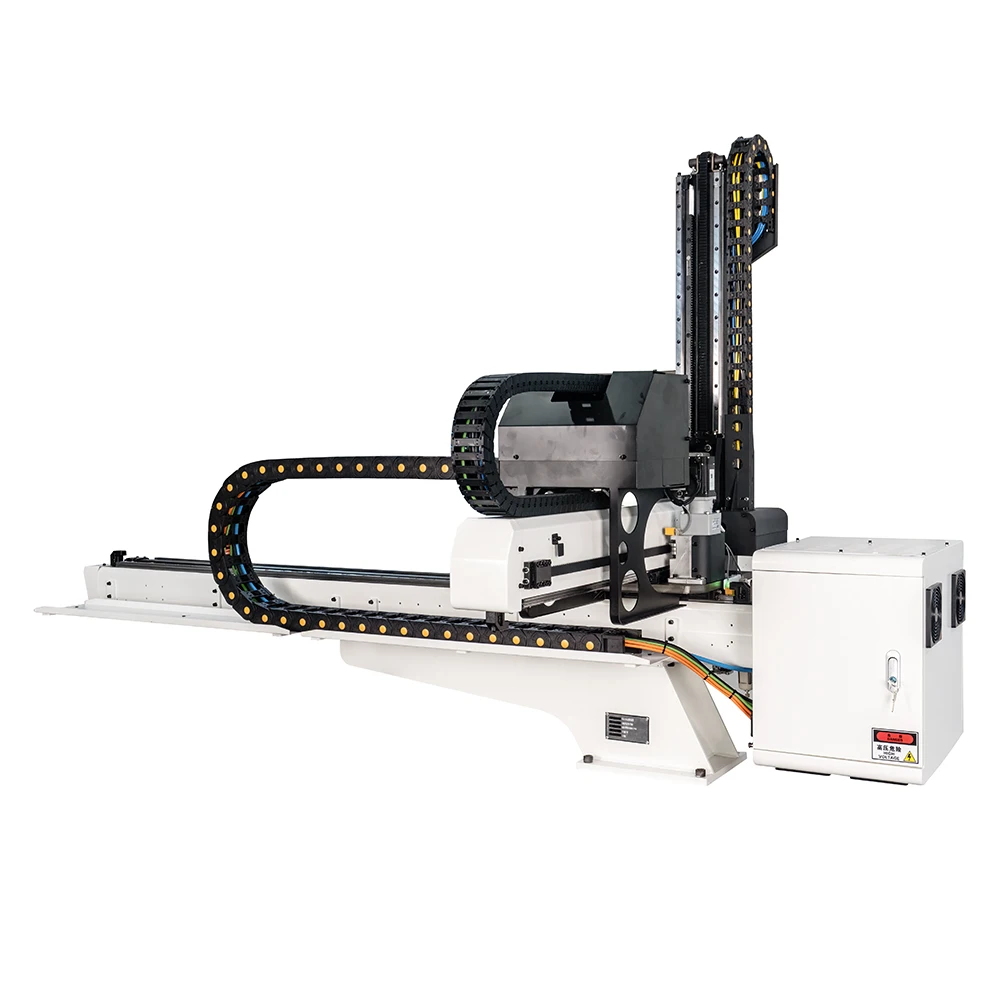
HEEEXii 제로 중력 조작기 로봇 암 산업용 조작기 흉부 조작기는 거의 모든 공장이나 상업용 작업 공간에 필수적인 장치입니다. 이 암은 정교하며 로봇 기술을 사용하여 여러 작업을 처리할 수 있으며, 흉부 조작도 쉽게 수행합니다.
제로 중력 조작기 로봇 팔 산업용 조작기 흉부 조작 공급 덕분에 다양한 환경에서 효과적으로 작동할 수 있으며, 그 크기가 소형이어서 공간이 제한된 곳에서도 사용할 수 있습니다. 또한 이 공급 장치는 다양한 표면에 부착될 수 있어 귀하의 요구 사항에 맞게 특별히 맞춤화됩니다.
HEEEXii 제로 중력 조작기 로봇 팔 산업용 조작기 흉부 조작기는 최대 10kg의 하중 용량을 가지고 있어 다양한 작업물을 운반, 들어 올리고 조작할 수 있어 매우 다재다능합니다. 부드럽고 정확한 움직임을 위한 지능형 제어 시스템이 탑재되어 있어 높은 정확도가 필요한 작업에 적합합니다.
HEEEXii 제로 중력 조작기 로봇 팔 산업용 조작기 흉부 조작의 많은 주요 이점 중 하나는 제로 중력 기능입니다. 이 기능은 카운터 밸런스 무게가 필요한 부분이며, 부드럽고 쉽게 작동할 수 있도록 합니다. 제로 중력 기능은 또한 작업자의 피로도를 줄이고 작업 효율성을 높입니다.
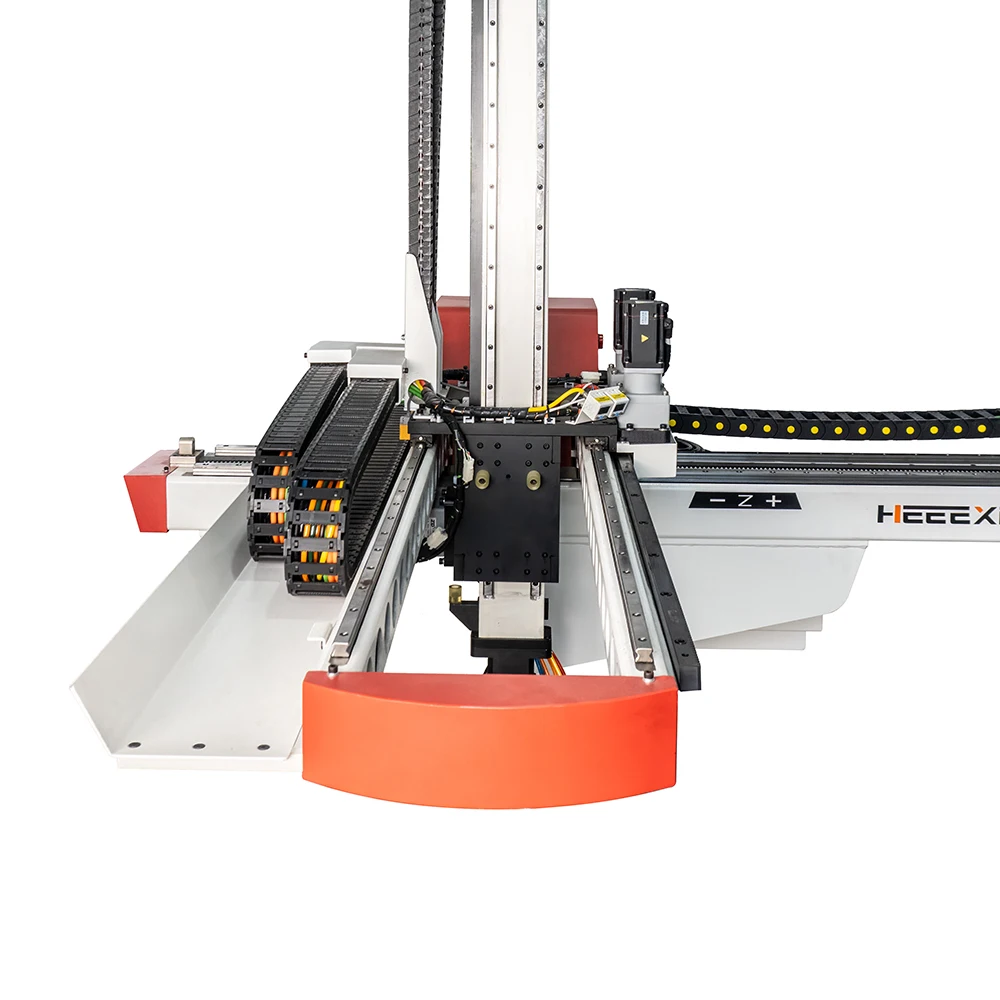
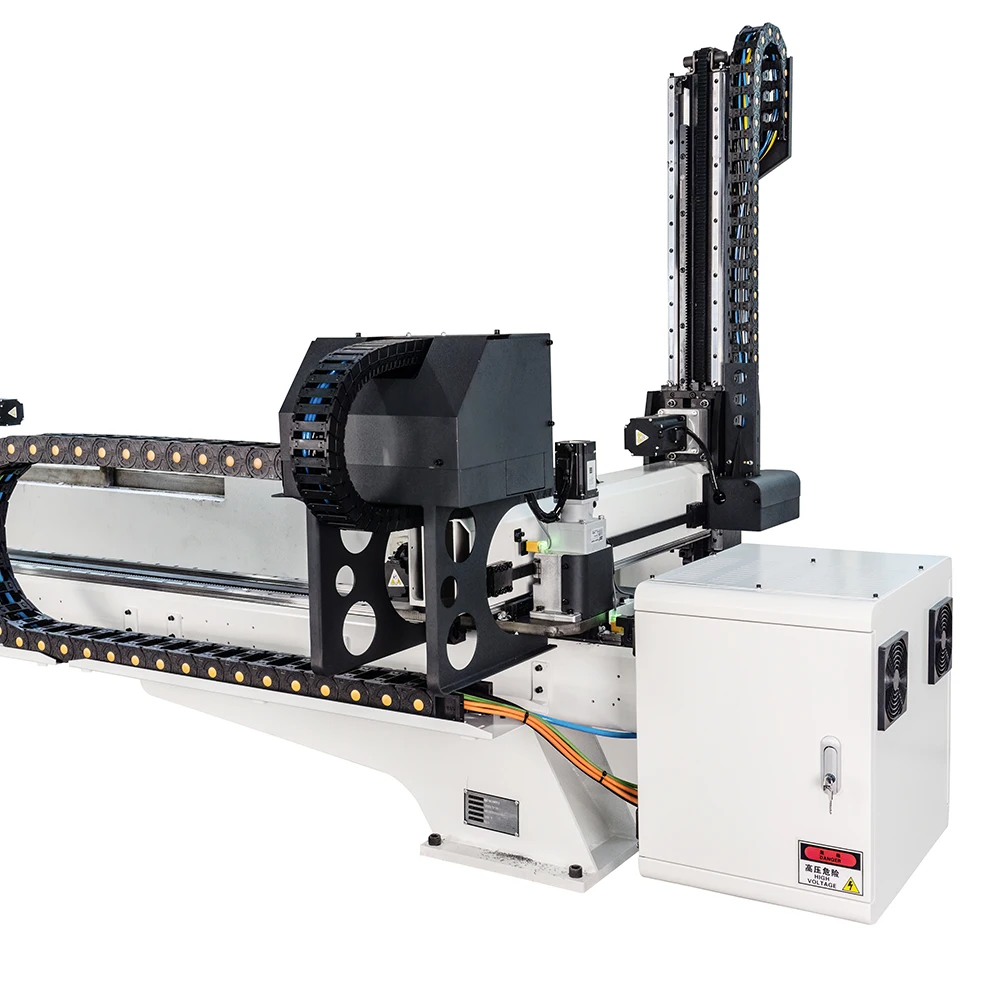
제로 중력 조작기 로봇 팔 산업용 조작기 흉부 조작기는 사용자 친화적인 애플리케이션을 특징으로 하며 다양한 작업을 완료하기 위해 간단히 프로그래밍할 수 있습니다. 팔의 컨트롤러는 사용하기 쉽고 직관적인 사용자 인터페이스를 가지고 있어 그 과정을 원활하게 만듭니다.
HEEEXii 제로 중력 조작기 로봇 암 산업용 조작기 흉부 조작기는 현대 상업 환경에서 필수적인 도구일 뿐만 아니라 능력 있는 장치가 될 수 있습니다. 최대 속도와 ±0.1mm의 반복성으로 높은 수준의 작업을 신속하게 완료할 수 있습니다. 이는 작업 공간에서 생산 시간을 줄이고 효율성을 높여 비용을 절감시킵니다.
제로 중력 조작기 로봇 암 산업용 조작기 흉부 조작기는 보통 신뢰性和 내구성을 보장하는 견고한 재료로 만들어집니다. 최소한의 유지 관리가 가능하며, 성능이나 기능성을 저하시키지 않고 혹독한 상업적 환경에 견딜 수 있습니다.
제품 이름 |
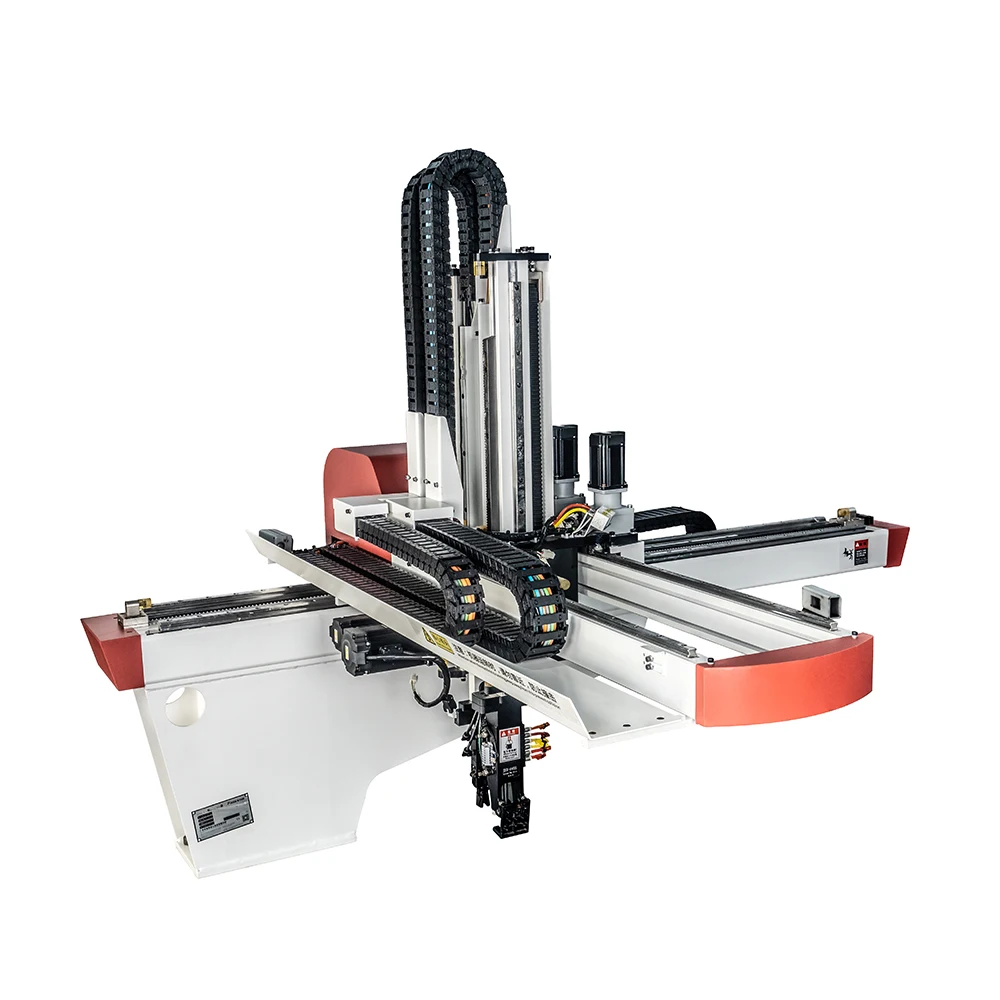
HXMB-5S Il -시리즈 내장형 전체 서보 조작기 |
최대 하중 |
20KG |
추출 시간 |
2.62Sec |
구동 시스템 |
X1,X2,Y1,Y2,ZAC 서보 모터 |
팔 구조 |
단일형 |
전력 |
AC220V 20A |
전력 소비 |
0.7Kw/시간 |
그리퍼 각도 |
90 |
공기 압력 |
0.5-0.8 MPa |
공기 소비 |
1.3 NL/사이클 |






































Guangdong Heeexii Robot Technology Co., Ltd. (abbreviation: Hengxing, HEEEXII), established in 2019, is a new star enterprise focusing on R&D, manufacturing, and sales of industrial injection molding robots.
Copyright © Guangdong Heeexii Robot Technology Co., Ltd. All Rights Reserved
 KO
KO
 EN
EN AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 LV
LV
 SR
SR
 UK
UK
 VI
VI
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 MS
MS
 GA
GA
 BE
BE
 IS
IS
 LA
LA
 MN
MN
 KK
KK