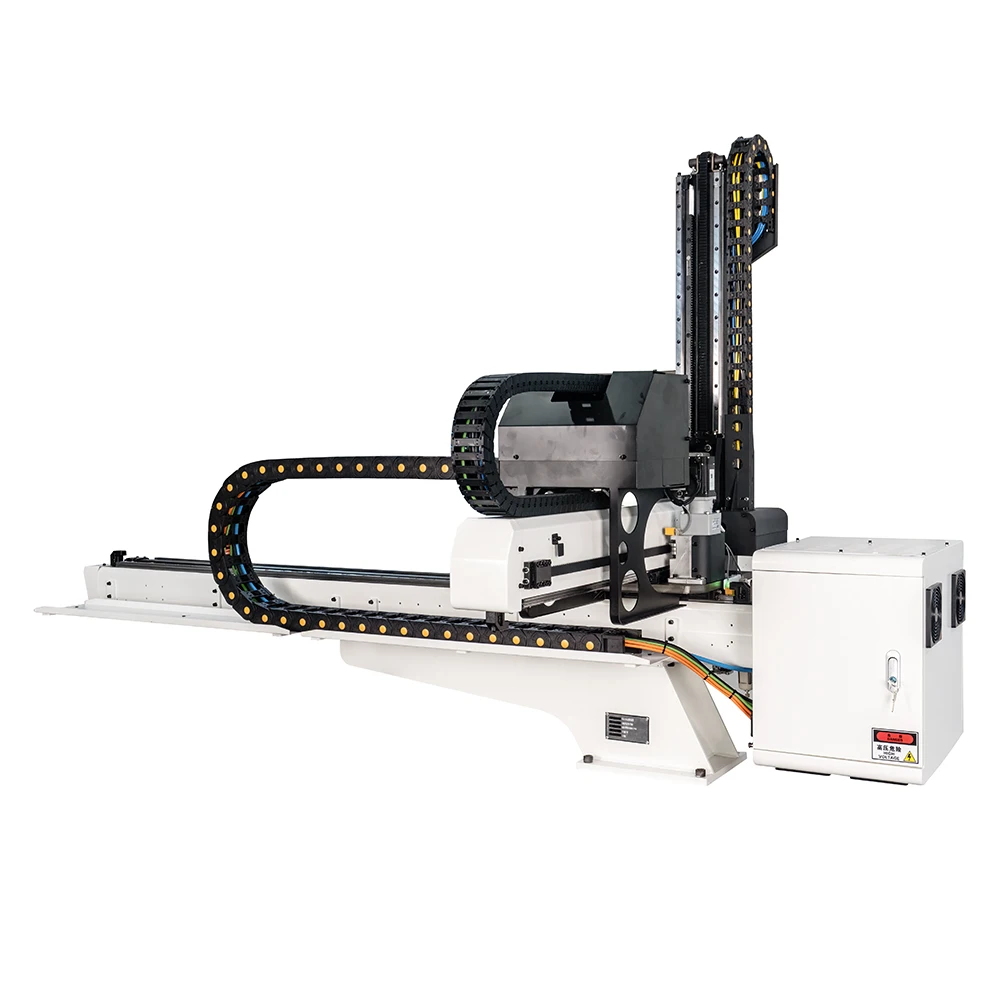
Productum Nomen |
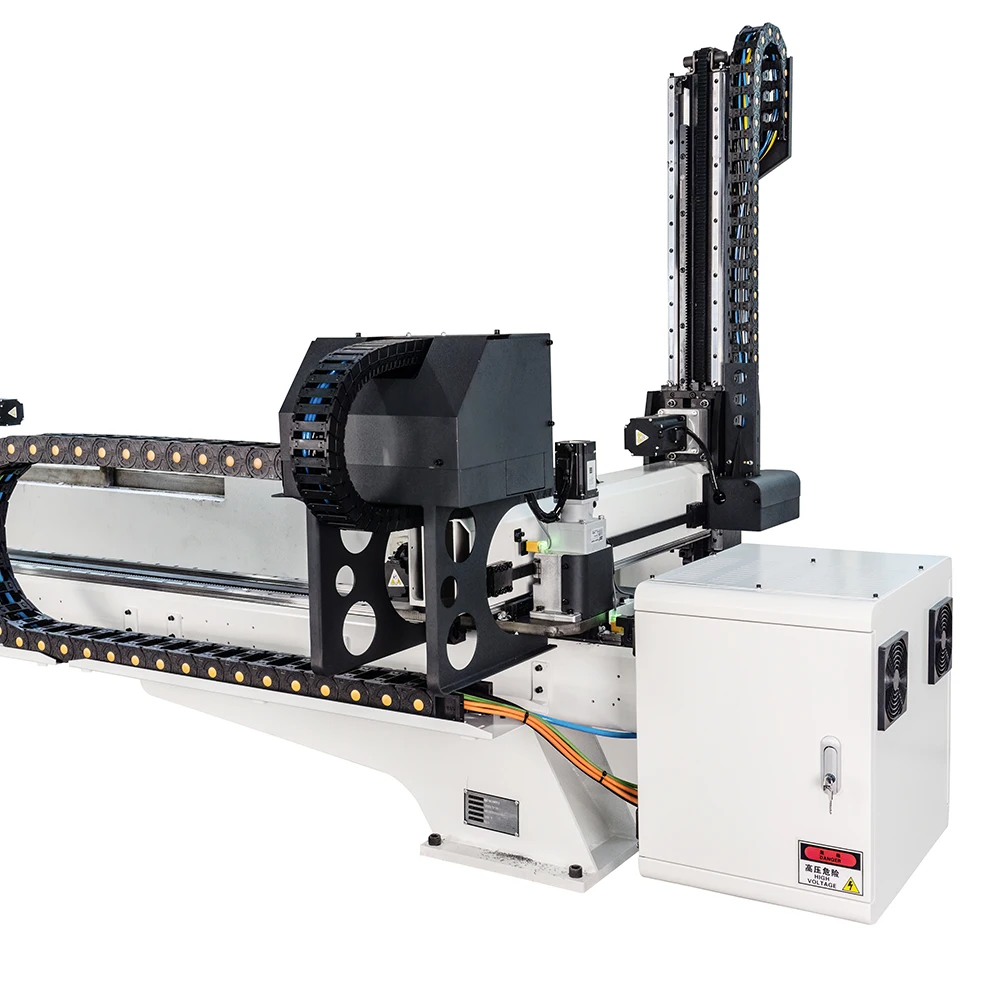
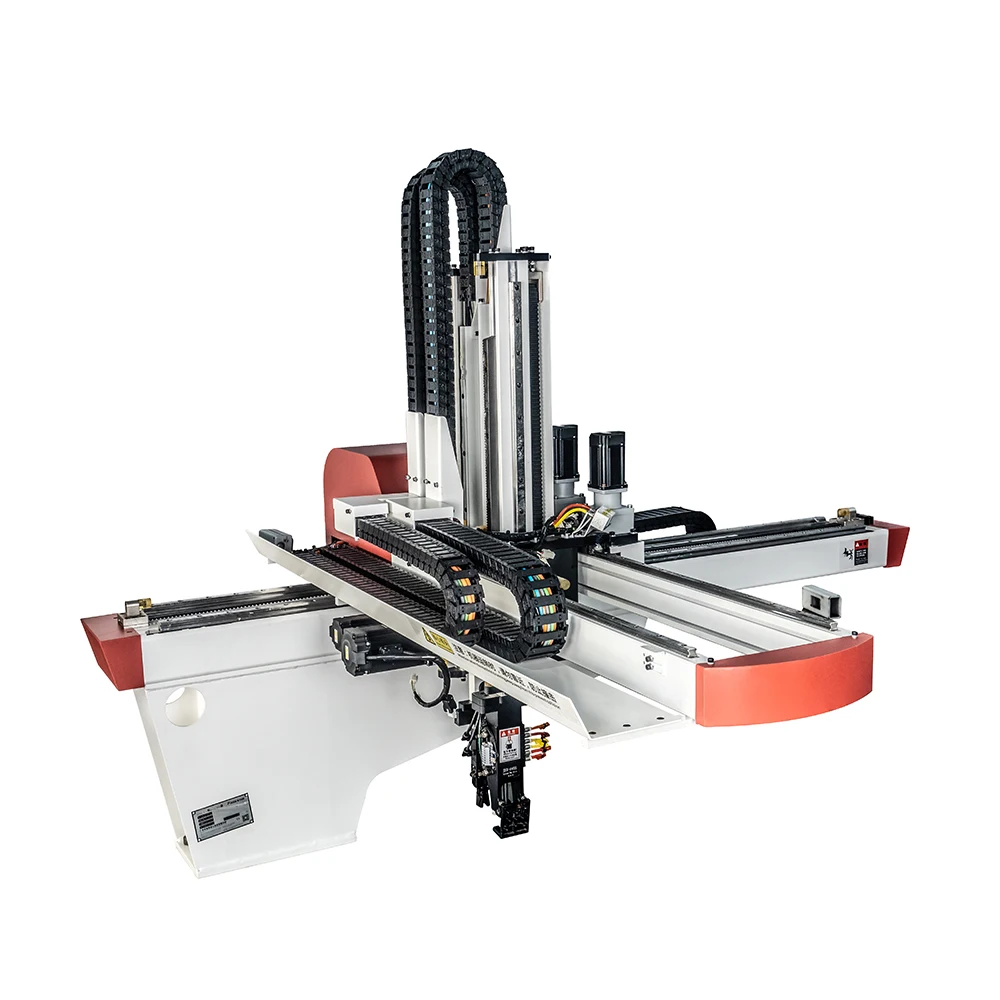
HXCW-5S Il -series Typus Framae manipulator totus servo |
Max. Onus |
30kg |
Tempus extractio |
2.22Sec |
Systema propulsionis |
X1,X2,Y1,Y2,ZAC Motor servo |
Structura brachii |
Genus telescopicum |
Potentia |
AC220V 20A |
Consumptio potentiae |
0.7Kw/h |
Angulus chelae |
90 |
Pressio aeris |
0.5-0.8 Mpa |
Consumptio aeris |
1.0 NL/cyclus |





























Marca: HEEEXii
Manipulator ROS trium axium electricus plenus servomotore mediocris oneris a HEEEXii non est aliud quam automatisma excellentissimae qualitatis, factum ad optimam faciendum tuam operationem manufacturalem. Hoc item vere constructum est ut revolutionarium propter technologiam servomotoris, quae praecisam et constantem motum pollicetur ad integrum incrementum effectivitatis in operationibus manufacturalibus tuis. Manipulator ROS factus est ut plurimum robotum industrialium utatur, praebens flexibilitatem optimam, quod eum reddit optima optione pro omni applicatione automationis fabricae.
Manipulator HEEEXii Medium Payload Axis Tres Servo Plenus Electricus Ros factus est ad curandam onera usque ad 50kg, quod eum facit remedium valde idoneum pro multis applicationibus. Praeterea, designatio axis trium securitatem et praecisionem certam praebet, quae est maxima reddita optima pro in lineis productionis celeribus. Manipulator electricus compactus eum facit aptum ad congruendum in spatia angusta et operandum cum variis lineis fabricationis efficienter.
Manipulator Ros trium axium servomotoris plenae electricitatis cum mediocri sarcina ab HEEEXii praebet fabricationem, quae est constans propter solidam structuram. Hoc systema in Asia constituitur, ubi periclitatur examinationem qualitatis ut certum faciat se normas universales implere. Manipulator ROS a HEEEXii conficitur ex materialibus optimis, quae possunt sustinere etiam conditiones fabricandi asperas. Propterea, per hanc rationem, manipulator ROS a HEEEXii potest facere processum tuum fabricandi suavius, efficacius in sumptibus, et tutius.
Inter plurima quae significare possunt cum manipulatore HEEEXii ROS, hoc est quod id adsequi potest in omni genere budget et magnopere diminuit sumptus operis. Manipulator ROS designatus est ad complexiores missiones, quas olim singula persona team perficere debebat. Haec solutio automatizationis incrementum productionis faciet per minuendum tempora circuli, quod vicissim etiam minuit onus laboris super operarios. Nunc team tuum potest intendere ad missiones complexiores et relinquare manipulatorem ROS ut curam habeat de officiis repetitis, communibus, et difficilibus.









Guangdong Heeexii Robot Technology Co., Ltd. (abbreviation: Hengxing, HEEEXII), established in 2019, is a new star enterprise focusing on R&D, manufacturing, and sales of industrial injection molding robots.
Iura omnia reservantur Guangdong Heeexii Robot Technology Co., Ltd. © Societas Technologiae Roboticae Guangdong Heeexii.
 EN
EN
 AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 LV
LV
 SR
SR
 UK
UK
 VI
VI
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 MS
MS
 GA
GA
 BE
BE
 IS
IS
 LA
LA
 MN
MN
 KK
KK





