Prodigiosus commoda Parallel Manipulator
Quid est Parallel Manipulator?
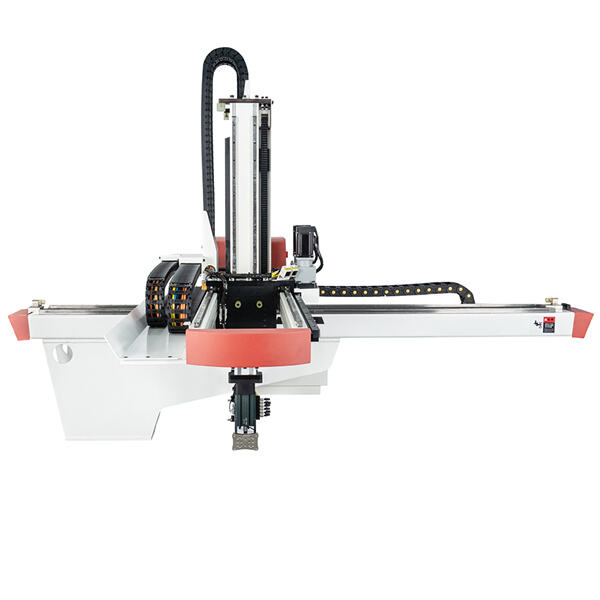
Manipulator synchronus explicari potest ut methodus haec vere technica certe constat paucis componentibus quae per paria kinematica rigida sunt. HEEEXii parallel tractatori revera typice usus est ad accurationem positionis solutionum in pluribus applicationibus. Hoc genus manipulatoris e basi fixa suggestum fixum est hoc actu movens ac cumulus catenae quae crura kinematica esse possunt quae lecti basii tuo suggestu coniungunt. Pedes sunt paralleli dispositi, quo tractatori ire permittit modo ordinato.
Una innovationum quae principaliter tractatori est parallela suo geometrico consilio. Constructum est in eximio intentoque modo, hoc certe rigidum est quod rigorem offert quae vim certo exaggerat, et diligentiam contra alios manipulatores. HEEEXii Vide tractatorem et tractatorem parallel praeterea structuram parallelam kinematicam cum quodam manipulatore permittit ut motus fungi simultaneus sit locus trium dimensivarum eximie therapeuticae pro applicationibus quae altam accurate obtinere cupiunt.

Beneficium quod additum est magnum tractatori non est difficile uti. Apparatus frequenter moderatur quod simplicia quae minime necessaria sunt, id facit ut amicabiliter utentes. HEEEXii industriae robotici bracchium manufacturers insuper vincula duplicata quae manipulatores kinematici sunt parallela nugatio quae securitatem ex fabrica melioris facit. Aliquot catenae deficiunt; alii tamen onus tantum offerre possunt, quod adiuvat accidentia quae missioni impediunt.
Parallela manipulatores ad ultimum destinantur, et earum qualitas est summa incisura. Vere ordinantur utentes materias quae summus gradus sunt durabiles et renitentes ad gestandum et dilacandum. HEEEXii parabilis brachium roboticum hae quoque de more duriori protegendo affliguntur, ut certa sint et metus requisita. Quod ad officium attinet, manipulatores paralleli non sunt id difficile custodire, et partes quae parcere facile possunt si reparationes factae sunt.

Guangdong Heeexii Robot Technologia Co. Ltd. anno 2019 condita est et societas summo-SCARIFATIO est quae in R et D fabricandis necnon venditionibus robotarum industrialium incumbit. Societas multos operarios habet qui decem annos tractatores parallelos habent.
Servos 3 et 5 axis plenos habemus robots, qui ad summum ingressum aptos una cum surculis ac machinis fanucis cum sex securibus apti sunt. Manipulus noster totam automationem cellam parallelam manipulatoris finis-of-arm-tooling, instrumenti inferioris nativus, tum diversorum instrumentorum plasmatores designare potest. Core technicae R et D manipulus sine inquisitione et evolutione itineris sui adhaeret et plures diplomates et iura possessionum intellectualium consecutus est.
Heeexii Robot proprium est studio excellentiae tum determinationis servandi bene ac facultatem innovandi, et {keyword} crescendi et cupiditatem supra seipsum excellendi. Phasellus per focus; excellentia, quia Phasellus. Heeexii Robot spiritui primae classis qualitatis constanti incrementi moderamine semper adhaerebit, firmum ac certos utentes offerens, dum contributiones porttitor vestibulum Sinarum facit.
Producta societas per amplis industriis adhibita, huiusmodi computatores, domus instrumenta sarcinarum pro optoelectronics, autocineta earum partium, praecisio anni industriae, PET praeparat industriam necessariam domum, instrumenta communicationis medicae mobiles tractatores parallelos.
Guangdong Heeexii Robot Technologia Co, Ltd. (abbreviatio: Hengxing, HEEEXII), anno MMXIX constituta, novum stellarum inceptum in R&D, fabricandis, et venditionibus robotarum coronae iniectionis industrialis.
Copyright © Guangdong Heeexii Robot Technology Co., Ltd. All Rights Reserved
 LA
LA
 EN
EN
 AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NON
NON
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 LV
LV
 SR
SR
 UK
UK
 VI
VI
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 MS
MS
 GA
GA
 BE
BE
 IS
IS
 MN
MN
 KK
KK









