Upptäck de Fantastiska Fördelarna med Parallel Manipulator
Vad är en Parallel Manipulator?
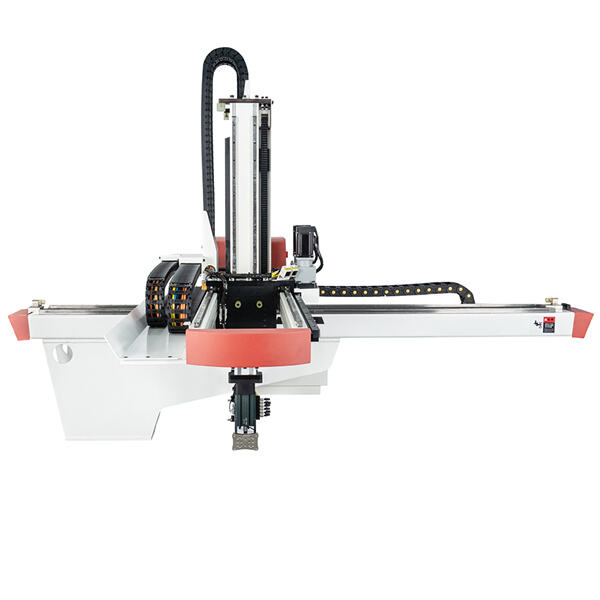
Synkron manipulator kan förklaras som en metod som är teknisk och består av flera komponenter som är stela genom kinematiska par. HEEEXii Parallell manipulator den används vanligtvis för precisionspositionering av laster i olika tillämpningar. Denna typ av manipulator består av en fast bas, en rörlig plattform och en samling kedjor som är kinematiska ben som kopplar basen till plattformen. Benen är arrangerade i parallell, vilket låter manipulatören röra sig på ett koordinerat sätt.
En av innovationerna som är huvudsakliga för manipulatören som är parallell är dess geometriska design. Den byggs på ett mycket stramt och extremt styvt sätt vilket ger betydligt förbättrade stelhet, styrka och noggrannhet i jämförelse med andra manipulatörer. HEEEXii seriell manipulator och parallell manipulator Dessutom möjliggör den parallella kinematiska strukturen hos denna typ av manipulator att utföra samtidig rörelse i tre dimensioner, vilket är extremt lämpligt för tillämpningar som kräver hög precision.

Ett ytterligare fördel med denna typ av manipulator är att den inte alls är svår att använda. Apparaten har vanligtvis kontroller som endast kräver enkel hantering och minimala behov, vilket gör den användarvänlig. HEEEXii Industriella robotarmsföretag utom det, så är de dubblerade kedjorna som är kinematiska manipulatörer med parallell redundant vilket förbättrar säkerheten på enheten. Om några av kedjorna misslyckas, så kan de andra bara ta hand om lasten, vilket hjälper till att förebygga olyckor och situationer.
Parallella manipulatörer är designade för att hålla i lång tid, och deras kvalitet är toppen. De är konstruerade med högkvalitativa material som är beståndiga och motstandsdygna mot utslitage. HEEEXii Tillgänglig robotarm dessutom, så utsätts dessa vanligtvis för strikt testning för att se till att de är pålitliga och uppfyller de krav som ställs. När det gäller underhåll, så är parallella manipulatörer inte så svåra att underhålla, och ersättningsdelar är lätt att få tag på om det behövs reparaturer.

Guangdong Heeexii Robot Technology Co. Ltd. grundades 2019 och är en toppklassföretag som fokuserar på forskning och utveckling, tillverkning samt försäljning av industriroboter. Företaget har många anställda med tio års erfarenhet inom parallellmanipulatorer.
Vi har fullt servo 3- och 5-axelsrobotar som passar för toppinträde tillsammans med sprue-pickers samt Fanuc-maskiner med sex axlar. Vår grupp kan designa hela automatiseringcellen parallellmanipulator slutarmverktyg, anpassat nedströmequipment, samt olika utrustning som formare kan använda. Kärnteknikens R och U-grupp håller på att följa en oberoende forskning och utvecklingsväg och har erhållit flera patent och immateriella rättigheter.
Heeexii Robot karakteriseras av strävan efter excelens, liksom bestämdheten att fortsätta och förmågan att innovera, och en växande {{keyword}} och en önskan att överträffa sig själv. professionellhet genom fokus; excelens eftersom professionellhet. Heeexii Robot kommer alltid att hålla fast vid andan av första klassens kvalitetskontroll och konstant tillväxt, samtidigt som den erbjuder stabila och pålitliga användare, medan bidrag till Kinas innovationsdrivna tillverkning.
Produkterna används i företaget över en bred spektrum av industrier, såsom datorer, hushållsapparater för optoelektronik, fordonskomponenter, precisionsgearsindustrin, PET-preformsindustrin hemmapplikationer, mobiltelekommunikation medikutrustning för emballage parallellmanipulator.
Guangdong Heeexii Robot Technology Co., Ltd. (forkortning: Hengxing, HEEEXII), grundad 2019, är ett nytt stjärnföretag som fokuserar på utveckling, tillverkning och försäljning av industriella injektionsformningsrobotar.
Copyright © Guangdong Heeexii Robot Technology Co., Ltd. All Rights Reserved
 SV
SV
 EN
EN AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 LV
LV
 SR
SR
 UK
UK
 VI
VI
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 MS
MS
 GA
GA
 BE
BE
 IS
IS
 LA
LA
 MN
MN
 KK
KK









