การค้นพบประโยชน์ที่น่าทึ่งของ Parallel Manipulator
Parallel Manipulator คืออะไร?
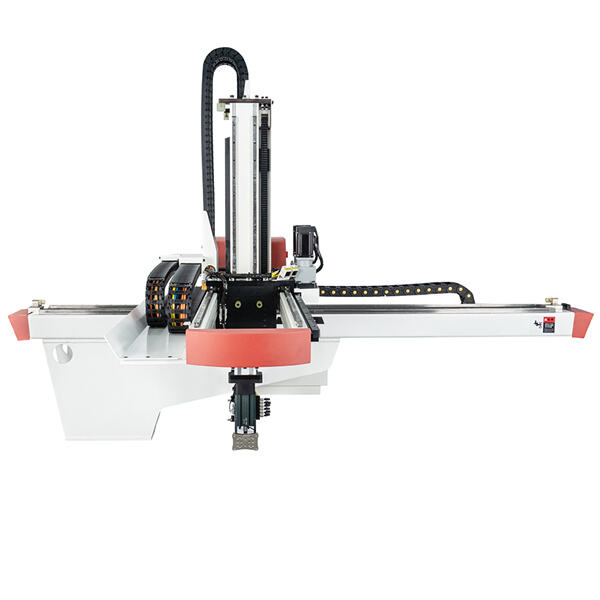
เครื่องจัดการแบบขนานสามารถอธิบายได้ว่าเป็นระบบหนึ่งที่มีความซับซ้อนประกอบด้วยองค์ประกอบหลายส่วนที่แข็งแรงผ่านคู่พลศาสตร์ HEEEXii หุ่นยนต์ควบคุมแบบขนาน โดยทั่วไปแล้วใช้สำหรับการวางตำแหน่งอย่างแม่นยำของโหลดในหลากหลายแอปพลิเคชัน ประเภทของเครื่องจักรนี้ประกอบด้วยฐานที่ติดตั้งแน่น แพลตฟอร์มที่เคลื่อนที่ได้ และกลุ่มโซ่ที่เป็นขาพลศาสตร์ที่เชื่อมระหว่างฐานกับแพลตฟอร์ม ขาเหล่านี้เรียงรายกันแบบขนาน ซึ่งช่วยให้เครื่องจักรเคลื่อนไหวได้อย่างประสานกัน
หนึ่งในนวัตกรรมที่สำคัญคือแขนกลแบบขนานซึ่งออกแบบทางเรขาคณิต มันถูกสร้างขึ้นในลักษณะที่แน่นหนาและแข็งแรงมาก ทำให้มีความแข็งแรง ความทนทาน และความแม่นยำสูงกว่าแขนกลชนิดอื่น HEEEXii แขนกลแบบซีเรียลและแขนกลแบบพาราลแลล นอกจากนี้ โครงสร้างแบบขนานที่มีลักษณะจลนศาสตร์คล้ายกับหุ่นยนต์แขนสามารถทำให้เกิดการเคลื่อนไหวในพื้นที่สามมิติพร้อมกันได้อย่างยอดเยี่ยม ซึ่งเหมาะสำหรับการใช้งานที่ต้องการความแม่นยำสูง

ข้อดีเพิ่มเติมของหุ่นยนต์แขนคือมันไม่ยากเลยที่จะใช้งาน อุปกรณ์นี้มักมีการควบคุมที่เรียบง่ายและต้องการการปรับแต่งน้อย ซึ่งทำให้ผู้ใช้งานสะดวก HEEEXii ผู้ผลิตแขนหุ่นยนต์อุตสาหกรรม นอกจากนี้ เชนิดของห่วงโซ่จลนศาสตร์ที่เป็นแบบขนานในหุ่นยนต์แขนช่วยเพิ่มความปลอดภัยจากการสำรองข้อมูล หากห่วงโซ่บางส่วนล้มเหลว ห่วงโซ่อื่นๆ ก็ยังคงรับน้ำหนักได้ ซึ่งช่วยป้องกันอุบัติเหตุได้ในสถานการณ์เช่นนี้
หุ่นยนต์แขนแบบขนานถูกออกแบบมาให้มีอายุการใช้งานยาวนาน และมีคุณภาพระดับสูงสุด โดยถูกสร้างจากวัสดุเกรดสูงที่ทนทานต่อการสึกหรอและความเสียหาย HEEEXii แขนหุ่นยนต์ที่ราคาไม่แพง นอกจากนี้ ยังมักจะถูกตรวจสอบอย่างเข้มงวดเพื่อให้แน่ใจว่าพวกมันน่าเชื่อถือและตรงตามข้อกำหนดที่ต้องการ ในด้านของการบริการ เครื่องจักรควบคุมแบบขนานไม่ยากที่จะบำรุงรักษา และชิ้นส่วนที่สามารถสำรองได้นั้นหาได้ง่ายในกรณีที่มีการซ่อมแซม

บริษัท Guangdong Heeexii Robot Technology Co. Ltd. ก่อตั้งขึ้นในปี 2019 เป็นบริษัทชั้นนำที่เน้นการวิจัยและพัฒนา การผลิตและการขายหุ่นยนต์อุตสาหกรรม บริษัทมีพนักงานจำนวนมากที่มีประสบการณ์ด้านแขนขนานเป็นเวลาสิบปี
เรามีหุ่นยนต์แบบเต็มระบบเซอร์โว 3 และ 5 แกนที่เหมาะสำหรับการเข้าด้านบน พร้อมกับหุ่นยนต์เก็บขี้ผึ้ง และเครื่องจักร Fanuc ที่มีหกแกน นอกจากนี้ทีมของเราสามารถออกแบบเซลล์อัตโนมัติทั้งหมด รวมถึงอุปกรณ์ปลายแขนแบบควบคุมขนาน อุปกรณ์หลังกระบวนการที่ปรับแต่งได้ และอุปกรณ์เสริมอื่นๆ ที่ผู้ผลิตแม่พิมพ์อาจใช้งานได้ ทีมงานวิจัยและพัฒนาเทคโนโลยีหลักปฏิบัติตามเส้นทางการวิจัยและพัฒนาอย่างเป็นอิสระ และได้รับสิทธิบัตรและทรัพย์สินทางปัญญาจำนวนมาก
รูปแบบของ Heeexii Robot นั้นแสดงให้เห็นถึงการแสวงหาความเป็นเลิศ การตัดสินใจที่จะก้าวต่อไป และความสามารถในการสร้างนวัตกรรม รวมถึงการเติบโตของ {{keyword}} และความปรารถนาที่จะเก่งกาจยิ่งกว่าตนเอง โดยมีความเป็นมืออาชีพผ่านการเน้นสมาธิ; ความเป็นเลิศเพราะความเป็นมืออาชีพ Heeexii Robot จะยึดมั่นในจิตวิญญาณของการควบคุมคุณภาพชั้นหนึ่งและการเติบโตอย่างต่อเนื่อง มอบความเสถียรและเชื่อถือได้แก่ผู้ใช้งาน ในขณะเดียวกันก็สนับสนุนการผลิตนวัตกรรมของประเทศจีน
ผลิตภัณฑ์ที่บริษัทใช้มีการประยุกต์ใช้ในวงกว้างในอุตสาหกรรมต่างๆ เช่น คอมพิวเตอร์ เครื่องใช้ไฟฟ้าภายในบ้าน การบรรจุภัณฑ์สำหรับอุปกรณ์ออปโตอิเล็กทรอนิกส์ อุตสาหกรรมรถยนต์และชิ้นส่วนของมัน อุตสาหกรรมเกียร์แม่นยำ อุตสาหกรรม PET preforms สินค้าเครื่องใช้ในบ้าน การสื่อสารเคลื่อนที่ และอุปกรณ์ทางการแพทย์ การบรรจุภัณฑ์แขนกลแบบขนาน
บริษัท Guangdong Heeexii Robot Technology Co., Ltd. (ย่อ: Hengxing, HEEEXII) ก่อตั้งขึ้นในปี 2019 เป็นธุรกิจดาวรุ่งที่เน้นการวิจัยและพัฒนา การผลิต และการขายหุ่นยนต์สำหรับอุตสาหกรรมการฉีดพลาสติก
Copyright © Guangdong Heeexii Robot Technology Co., Ltd. All Rights Reserved
 TH
TH
 EN
EN AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 LV
LV
 SR
SR
 UK
UK
 VI
VI
 HU
HU
 TR
TR
 FA
FA
 MS
MS
 GA
GA
 BE
BE
 IS
IS
 LA
LA
 MN
MN
 KK
KK









